- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Pil Ölçerlere Giriş
Pil Ölçerlere Giriş
1.1 Elektrik sayacının fonksiyonlarına giriş
Pil yönetimi güç yönetiminin bir parçası olarak düşünülebilir. Pil yönetiminde, elektrik sayacı pil kapasitesinin tahmin edilmesinden sorumludur. Temel işlevi voltajı, şarj/deşarj akımını ve pil sıcaklığını izlemek ve pilin şarj durumunu (SOC) ve tam şarj kapasitesini (FCC) tahmin etmektir. Bir pilin şarj durumunu tahmin etmek için iki tipik yöntem vardır: açık devre voltajı yöntemi (OCV) ve Coulombic ölçüm yöntemi. Diğer bir yöntem ise RICHTEK tarafından tasarlanan dinamik voltaj algoritmasıdır.
1.2 Açık devre voltajı yöntemi
Bir elektrik sayacı için açık devre voltajı yöntemini kullanmanın uygulama yöntemi nispeten kolaydır ve açık devre voltajının ilgili şarj durumunun kontrol edilmesiyle elde edilebilir. Açık devre voltajı için varsayılan koşul, akü yaklaşık 30 dakika dinlenirken akü terminal voltajıdır.
Akünün voltaj eğrisi akünün yüküne, sıcaklığına ve eskimesine bağlı olarak değişir. Bu nedenle, sabit bir açık devre Voltmetre şarj durumunu tam olarak temsil edemez; Yalnızca tablolara bakarak şarj durumunu tahmin etmek mümkün değildir. Başka bir deyişle, şarj durumu yalnızca tabloya bakılarak tahmin ediliyorsa hata önemli olacaktır.
Aşağıdaki şekil aynı akü voltajı altında açık devre voltajı yöntemiyle elde edilen şarj durumunda önemli bir fark olduğunu göstermektedir.
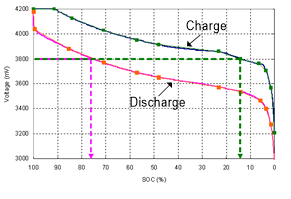
Şekil 5. Şarj ve deşarj koşullarında akü voltajı
Aşağıdaki şekilde gösterildiği gibi, deşarj sırasında farklı yükler altında şarj durumunda da önemli bir fark vardır. Dolayısıyla, temel olarak, açık devre voltajı yöntemi yalnızca kurşun asitli piller veya kesintisiz güç kaynakları kullanan arabalar gibi şarj durumu için düşük doğruluk gereksinimlerine sahip sistemler için uygundur.
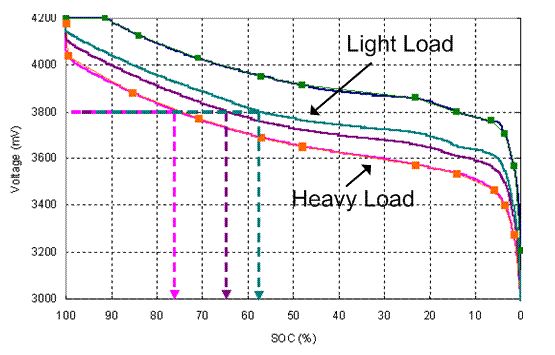
Şekil 2. Deşarj sırasında farklı yükler altında akü voltajı
1.3 Coulomb metrolojisi
Coulomb metrolojisinin çalışma prensibi pilin şarj/deşarj yoluna bir algılama direnci bağlamaktır. ADC, algılama direnci üzerindeki voltajı ölçer ve bunu şarj edilen veya deşarj edilen pilin mevcut değerine dönüştürür. Gerçek zamanlı sayaç (RTC), kaç Coulomb'un aktığını belirlemek için mevcut değerin zamanla entegrasyonunu sağlar.

Şekil 3. Coulomb ölçüm yönteminin temel çalışma modu
Coulombic metroloji, şarj etme veya boşaltma işlemi sırasında şarjın gerçek zamanlı durumunu doğru bir şekilde hesaplayabilir. Bir şarj Coulomb sayacı ve bir deşarj Coulomb sayacı kullanarak, kalan elektrik kapasitesini (RM) ve tam şarj kapasitesini (FCC) hesaplayabilir. Aynı zamanda kalan şarj kapasitesi (RM) ve tam şarjlı kapasite (FCC) de şarj durumunu hesaplamak için kullanılabilir, yani (SOC=RM/FCC). Ayrıca, güç tükenmesi (TTE) ve gücün yeniden şarj edilmesi (TTF) gibi kalan süreyi de tahmin edebilir.
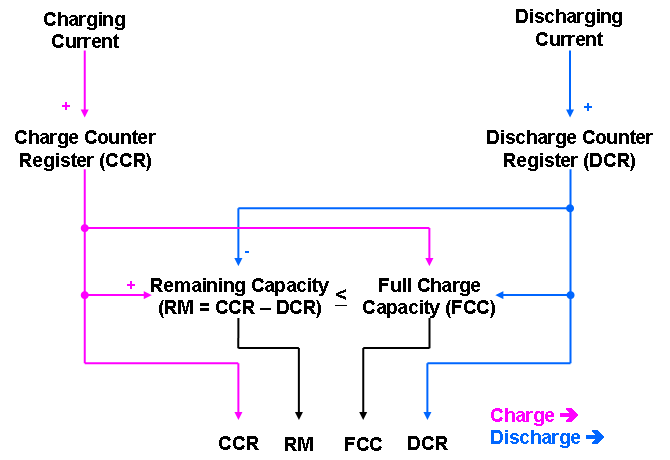
Şekil 4. Coulomb Metrolojisine İlişkin Hesaplama Formülü
Coulomb metrolojisinin doğruluk sapmasına neden olan iki ana faktör vardır. Birincisi, akım algılama ve ADC ölçümünde ofset hatalarının birikmesidir. Ölçüm hatası mevcut teknolojiyle nispeten küçük olmasına rağmen, bunu ortadan kaldıracak iyi bir yöntem olmadığında, bu hata zamanla artacaktır. Aşağıdaki şekil, pratik uygulamalarda, zaman içerisinde herhangi bir düzeltme yapılmaması halinde, birikmiş hatanın sınırsız olduğunu göstermektedir.
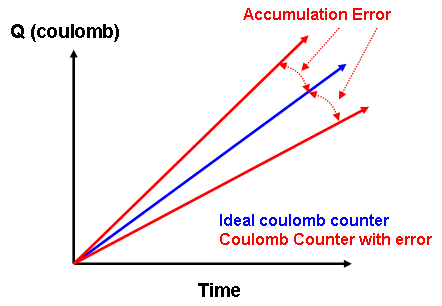
Şekil 5. Coulomb ölçüm yönteminin birikmiş hatası
Kümülatif hataları ortadan kaldırmak için pilin normal çalışması sırasında kullanılabilecek üç olası zaman noktası vardır: Şarj Sonu (EOC), Deşarj Sonu (EOD) ve Dinlenme (Rahatlama). Şarj sonu koşulu karşılandığında, pilin tamamen şarj olduğunu ve Şarj Durumunun (SOC) %100 olması gerektiğini gösterir. Deşarj sonu durumu, pilin tamamen boşaldığını ve Şarj Durumunun (SOC) %0 olması gerektiğini gösterir; Mutlak bir voltaj değeri olabilir veya yüke göre değişebilir. Pil dinlenme durumuna ulaştığında ne şarj edilir ne de deşarj olur ve uzun süre bu durumda kalır. Kullanıcı kulometrik yöntemin hatasını düzeltmek için pilin dinlenme durumunu kullanmak isterse, bu sırada açık devre bir Voltmetre kullanılmalıdır. Aşağıdaki şekil, şarj durumu hatasının yukarıdaki durumlarda düzeltilebileceğini göstermektedir.
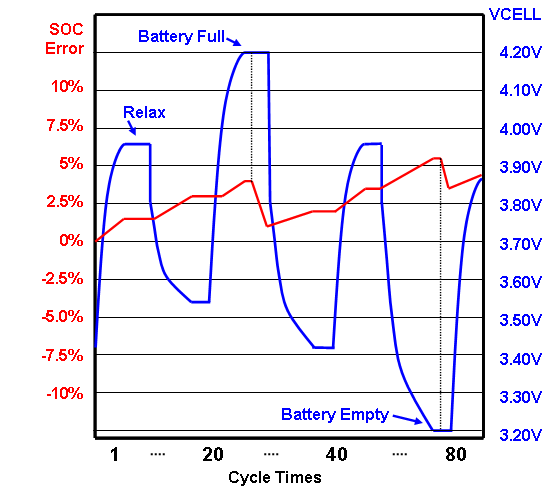
Şekil 6. Coulombic Metrolojide Birikmiş Hataların Ortadan Kaldırılması İçin Koşullar
Coulomb metrolojisinin doğruluk sapmasına neden olan ikinci ana faktör, pilin tasarlanan kapasitesi ile pilin gerçek tam şarj kapasitesi arasındaki fark olan Tam Şarj Kapasitesi (FCC) hatasıdır. Tam şarjlı kapasite (FCC), sıcaklık, eskime ve yük gibi faktörlerden etkilenir. Bu nedenle, tam şarjlı kapasite için yeniden öğrenme ve telafi yöntemleri Coulombic metroloji için çok önemlidir. Aşağıdaki şekil, tam şarjlı kapasite fazla tahmin edildiğinde ve hafife alındığında şarj durumu hatası trend olgusunu göstermektedir.
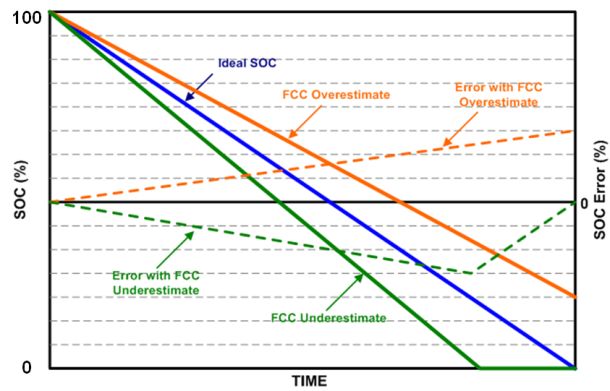
Şekil 7: Tam şarjlı kapasite fazla tahmin edildiğinde ve hafife alındığında hata eğilimi
1.4 Dinamik voltaj algoritması elektrik sayacı
Dinamik voltaj algoritması, yalnızca pil voltajına dayalı olarak bir lityum pilin şarj durumunu hesaplayabilir. Bu yöntem, akü voltajı ile pilin açık devre voltajı arasındaki farka bağlı olarak şarj durumunun artışını veya azalmasını tahmin eder. Dinamik voltaj bilgisi, lityum pillerin davranışını etkili bir şekilde simüle edebilir ve şarj durumunu (SOC) (%) belirleyebilir, ancak bu yöntem pil kapasitesi değerini (mAh) tahmin edemez.
Hesaplama yöntemi, akü voltajı ile açık devre voltajı arasındaki dinamik farka dayanır ve şarj durumundaki her artışı veya azalmayı hesaplamak için yinelemeli algoritmalar kullanarak şarj durumunu tahmin eder. Dinamik voltaj algoritmalı elektrik sayaçları, Coulomb yöntemi elektrik sayaçlarının çözümüyle karşılaştırıldığında zaman ve akıma bağlı olarak hata biriktirmez. Coulombic ölçüm cihazları, akım algılama hataları ve pilin kendi kendine boşalması nedeniyle çoğu zaman şarj durumu hakkında hatalı tahminlerde bulunur. Akım algılama hatası çok küçük olsa bile Coulomb sayacı hatalar biriktirmeye devam edecektir ve bu durum ancak şarj veya deşarjın tamamlanmasından sonra ortadan kaldırılabilir.
Dinamik voltaj algoritması, yalnızca voltaj bilgisine dayalı olarak bir pilin şarj durumunu tahmin etmek için kullanılır; Pilin güncel bilgilerine göre tahmin yapılmadığından herhangi bir hata birikimi söz konusu değildir. Şarj durumunun doğruluğunu artırmak için dinamik voltaj algoritmasının, tam şarjlı ve tamamen boş koşullar altında gerçek akü voltajı eğrisine dayalı olarak optimize edilmiş bir algoritmanın parametrelerini ayarlamak için gerçek bir cihaz kullanması gerekir.
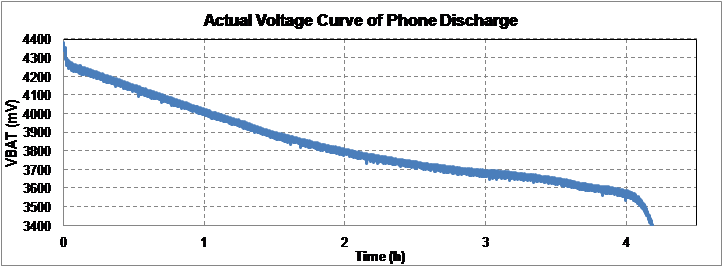

Şekil 8. Elektrik Sayacı ve Kazanç Optimizasyonu için Dinamik Gerilim Algoritmasının Performansı
Aşağıda, şarj durumuna göre farklı deşarj oranı koşulları altında dinamik voltaj algoritmasının performansı verilmiştir. Şekilde görüldüğü gibi şarj doğruluğu iyidir. C/2, C/4, C/7 ve C/10 deşarj koşullarından bağımsız olarak bu yöntemin genel şarj durumu hatası %3'ten azdır.

Şekil 9. Dinamik Gerilim Algoritmasının Farklı Deşarj Hızı Koşullarında Şarj Durumu Performansı
Aşağıdaki şekil, kısa şarj ve kısa deşarj koşulları altında pilin şarj durumunu göstermektedir. Şarj durumu hatası hala çok küçük ve maksimum hata yalnızca %3'tür.

Şekil 10. Akülerin Kısa Şarj ve Kısa Deşarj Durumunda Dinamik Gerilim Algoritmasının Şarj Durumu Performansı
Akım algılama hataları ve pilin kendi kendine boşalması nedeniyle genellikle hatalı şarj durumuyla sonuçlanan Coulomb ölçüm yöntemiyle karşılaştırıldığında, dinamik voltaj algoritması zaman ve akım boyunca hatalar biriktirmez; bu da büyük bir avantajdır. Şarj/deşarj akımları hakkında bilgi eksikliği nedeniyle, dinamik voltaj algoritmasının kısa vadeli doğruluğu zayıf ve tepki süresi yavaştır. Ayrıca tam şarj kapasitesini tahmin edemez. Bununla birlikte, akü voltajı sonuçta doğrudan şarj durumunu yansıttığından, uzun vadeli doğruluk açısından iyi bir performans sergiliyor.
Talep Gönder


X
Size daha iyi bir gezinme deneyimi sunmak, site trafiğini analiz etmek ve içeriği kişiselleştirmek için çerezleri kullanıyoruz. Bu siteyi kullanarak çerez kullanımımızı kabul etmiş olursunuz.
Gizlilik Politikası